风是风电发展中最重要的环节,也是风电项目中最大的不确定因素,它影响风力发电机组的设计成本,威胁风力发电机组的运行安全,决定风电机组的最终运行状况。因而准确地捕捉风况,从而为风机的运行提供有效的参考至关重要。

风是风电发展中最重要的环节,也是风电项目中最大的不确定因素,它影响风力发电机组的设计成本,威胁风力发电机组的运行安全,决定风电机组的最终运行状况。因而准确地捕捉风况,从而为风机的运行提供有效的参考至关重要。

传统风速风向仪的测风方式是“触摸”风,也就是当风吹到机组才能测量到。由于叶轮旋转造成旋流和扰流,使得风速仪测到的风速受到强烈干扰,所测出来的风速并非叶轮前的风速,而是衰减后的风速。同时风向仪还存在一定程度的安装误差,如果不能及时纠正并发现这一安装误差,就会造成发电量损失,同时也会增加叶轮面上的推力不平衡,从而造成载荷增大。
激光雷达测风方式为非接触测量,犹如为风机装上了观测风速的眼睛,可以主动测量距离机组前一定范围的风速,不受气动外形和尾流的影响,测量精度高。精准的测量结果与连续的趋势变化感知对机组的主动控制有相当大的指导意义。
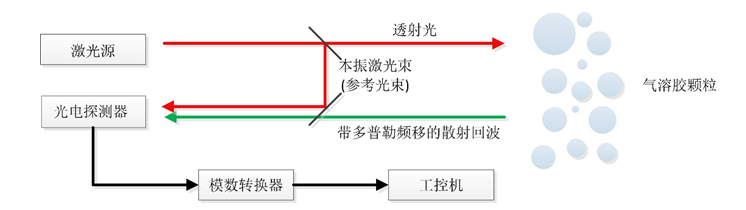
目前投入应用的机载式激光雷达属于相干激光雷达(Coherent Laser Radar ),根据相关光系统可细分为连续波雷达(Continuous Wave Lidar)和脉冲雷达(Pulsed Lidar),两者的基本工作原理上是一致的。当相干光束照射到空气中的气溶胶颗粒,一部分光会被气溶胶颗粒散射而产生回波。根据多普勒原理,气溶胶颗粒沿相关光束方向的运动会导致回波的频率变化,如下式所示:

上式中,c 代表光速, Vlos是气溶胶颗粒沿相关光光束方向的运动速度,ν和λ分别代表激光束的频率和波长,δν是回波信号的频移。根据多普勒原理,回波信号的频移是正比于气溶胶颗粒运动速度(风速)的。在机载式激光雷达内部,回波光束和本机振荡器(参考光束)在光电探测器内进行拍频处理,光电探测器的输出再经过模数转换,在工控机内进行频谱处理等数字调解方法,最终获得风速风向等信息。
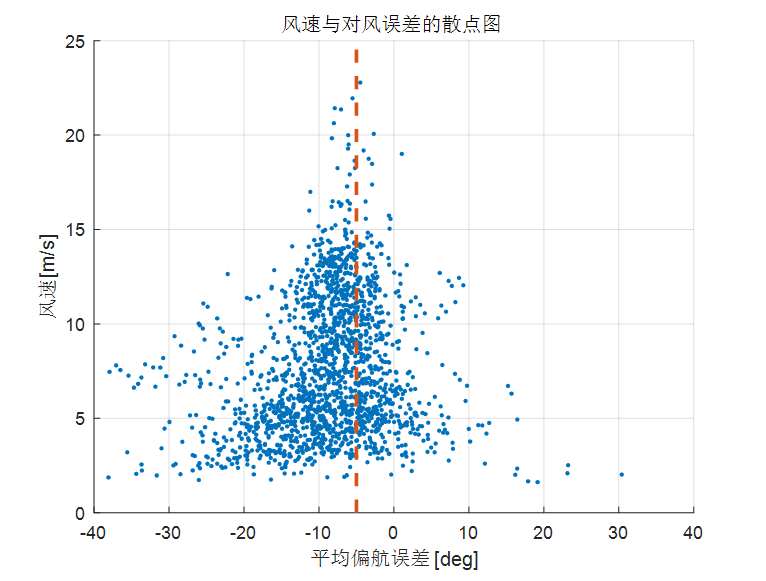
由于传统风速风向仪测风原理的局限性,目前风机普遍存在一定的偏航安装误差。机载式激光雷达可以帮助偏航控制系统实现快速精准的对风,避免风能损失。下图为运达股份根据激光雷达采集的信息绘制出某测试风机10分钟平均对风误差和10分钟平均风速的散点图。从该风机的测试数据可以看出,机组存在对风误差:散点的分布非常广,尤其是在低风速区,平均的偏航误差均值在6度左右,通过偏航误差矫正,该机组的发电量有望提升1.6%左右。
实际风场中,上风向风机带来的尾流效应降低了下风向风机的来流风速,全尾流覆盖工况下,下游风机功率损失可达50%,同时尾流还带来了附加的湍流强度,造成更大的部件疲劳载荷。湍流强度作为尾流的识别特征之一,给机载式激光雷达探测尾流提供依据。激光雷达通过测量各个光束的湍流强度,识别尾流的来向,从而调整风力发电机组的偏航角度,削弱尾流效应的影响。
近年来,前馈控制技术在机组载荷设计领域受到更多的重视。特别是在结合场级尾流控制之后,有效缓解由风场内复杂尾流影响带来的发电量损失和机组疲劳,提升了整个风场的经济效益和可靠性。
实现前馈算法的基础是准确有效的风速输入,多光束机载式激光雷达的出现,使得测量来自上风向的整个叶轮面的等效风速成为了可能,运达股份通过实际机组特性对比验证了激光雷达重构风速的有效性。
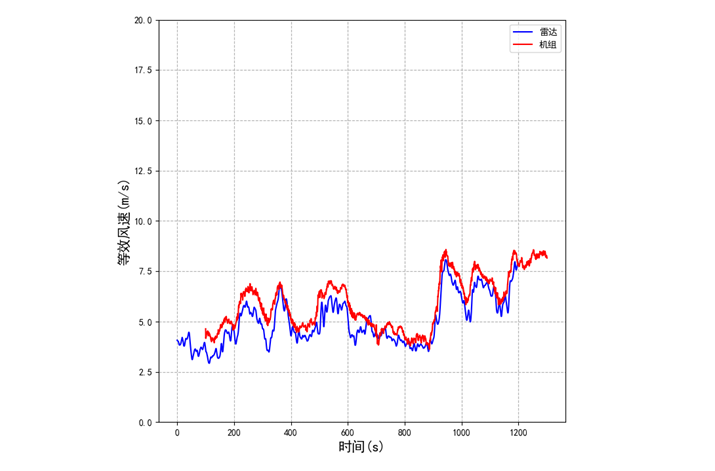
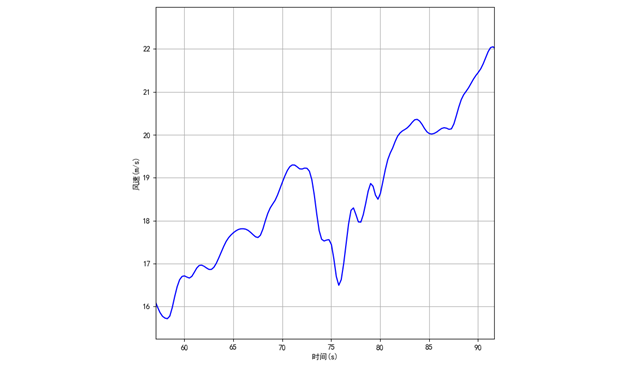
利用机组的叶轮转速、电磁转矩等动态特性,推演出当前作用于风机的实时等效风速。激光雷达重构出的雷达等效风速,则作为这一风速的超前量,经滞后处理,用于前馈算法。下图中红线是利用机组动态特性绘制出的实时等效风速,蓝线是激光雷达经风场重构的风速(经滞后处理),可以看出两者良好的吻合度。这意味着激光雷达合成风速可以很好地作为前馈控制的输入。
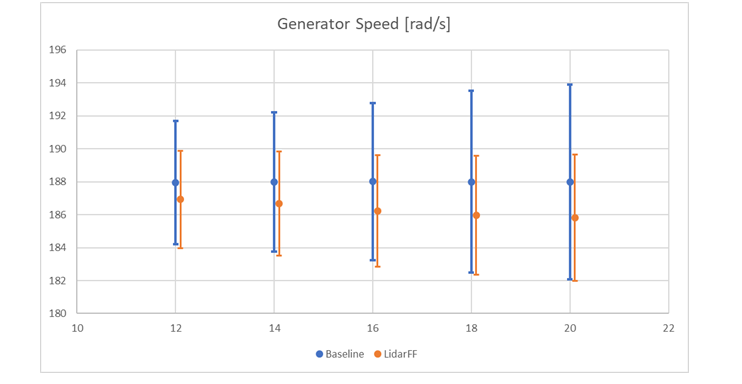
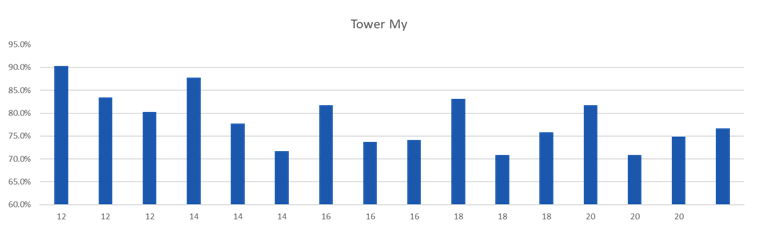
通过雷达前馈控制,可以更好地控制发电机转速。下图中,蓝线代表基准控制器发电机转速控制效果,橙色代表加入雷达前馈控制后的控制效果;竖线的长度表示发电机转速标准差,竖线上的点表示发电机转速均值。从图中可以看出,在各个风速段下,引入雷达前馈控制以后,不仅发电机转速均值出现了下降,发电机转速标准差也出现了下滑,这意味着发电机转速可以得到更平滑的控制。
同时,雷达前馈控制还可以有效地降低塔底弯矩。从下图中的多次测试结果可以看出,相对于基准控制器,采用雷达前馈控制后,塔底My的等效疲劳载荷降低了10%以上。
来流风速的大小变化,决定了风电机组的发电量和承受的载荷。来流为阵风或者强湍流时会引起主机,尤其是主轴和齿轮箱部分载荷增大,可能引起机组停机或者故障,直接造成了发电量损失。
如果机载式激光雷达可以测量到机组前50~100米的风速变化,那么当机组探测到极限阵风后,提前2~3秒进行前馈控制,提前变桨,实现风电机组降载,就可以良好地抵御极限阵风带来的高负载,从而有利于在低风速区机组配备更大的叶轮。然而伴随叶轮半径不断的增加,风剪切、湍流等现象在叶轮面上产生的不平衡载荷进一步变大,独立变桨技术,是解决这一问题的良好办法。
雷达测得阵风示意图
在实际应用中会产生这样一对矛盾:一方面如果风力发电机组一直开启独立变桨策略,往往会因变桨过于频繁而导致变桨轴承寿命受到影响;另一方面,叶轮不平衡载荷在强湍流条件下表现得更为明显。运达股份在这方面做了大量深入的研究,将激光雷达技术和独立变桨技术有效结合,探索出独立变桨技术的高效应用策略。
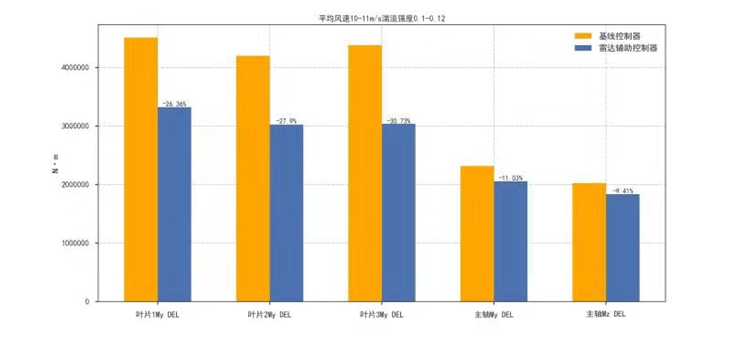
运达股份通过激光雷达监测来流风的湍流强度,实现降载和零部件疲劳载荷的平衡。在湍流强度达到一定阈值时,开启独立变桨,既可以显著降低叶轮推力不平衡引起的疲劳载荷,也缓解了变桨过于频繁导致变桨轴承零部件的寿命问题。在较高湍流强度下开启独立变桨,主要部件的等效疲劳载荷值可较同条件下的协同变桨控制出现了明显下降。在风速为10~11m/s和湍流强度为0.10~0.12 区间内,叶根My的疲劳载荷可降低24.74%,主轴My的等效疲劳载荷可降低10.42%,主轴Mz的等效疲劳载荷可降低8.29%。
随着我国风电行业的持续发展,高功率大叶片机组伴随着复杂地形带来的复杂风况,给风机的载荷、寿命和发电量都带来了不小的挑战。运达股份通过引入机载式激光雷达,并与智能控制策略有机结合,大大提高了运达股份机组的技术先进性,给机组带来多层级的感知能力。作为风电行业的开拓者和创新者,运达股份一直积极响应市场需求,坚持技术创新应对新挑战,为风电机组的智能化打下坚实的基础。




























